- Robot Mobile
Robot Mobil atau Mobile Robot adalah
konstruksi robot yang ciri khasnya adalah mempunyai aktuator berupa
roda untuk menggerakkan keseluruhan badan robot tersebut, sehingga robot
tersebut dapat melakukan perpindahan posisi dari satu titik ke titik
yang lain.
Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot. Hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang berat. Untuk dapat membuat sebuah robot mobile minimal diperlukan pengetahuan tentang mikrokontroler dan sensor-sensor elektronik.
Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot. Hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang berat. Untuk dapat membuat sebuah robot mobile minimal diperlukan pengetahuan tentang mikrokontroler dan sensor-sensor elektronik.
 |
| Robot Mobile |
Base robot
mobil dapat dengan mudah dibuat dengan menggunakan plywood /triplek,
akrilik sampai menggunakan logam ( aluminium ). Robot mobil dapat dibuat
sebagai pengikut garis ( Line Follower ) atau pengikut dinding ( Wall
Follower ) ataupun pengikut cahaya.
pengembangan yang dilakukan oleh beberapa anak bangsa bahkan anak SMA pun telah mencoba untuk mengembangkan robot mobile ini untuk beberapa fungsi, diantaranya ada robot line follower, maze solving dan beberapa bentuk lain yang lebih unik seperti yang sekarang sedang dikembangkan oleh Ektrakurikuler Robotik( Robota Robotics School ), dan beberapa perlombaan pun diadakan untuk menguji sejauh mana anak-anak mampu untuk mendalami ilmu robotika.
pengembangan yang dilakukan oleh beberapa anak bangsa bahkan anak SMA pun telah mencoba untuk mengembangkan robot mobile ini untuk beberapa fungsi, diantaranya ada robot line follower, maze solving dan beberapa bentuk lain yang lebih unik seperti yang sekarang sedang dikembangkan oleh Ektrakurikuler Robotik( Robota Robotics School ), dan beberapa perlombaan pun diadakan untuk menguji sejauh mana anak-anak mampu untuk mendalami ilmu robotika.
- Robot Jaringan
Robot jaringan adalah pendekatan baru untuk melakukan kontrol robot menggunakan jaringan internet dengan protokol TCP/IP. Perkembangan robot jaringan
dipicu oleh kemajuan jaringan dan internet yang pesat. Dengan koneksi
jaringan, proses kontrol dan monitoring, termasuk akuisisi data bila
ada, seluruhnya dilakukan melalui jaringan. Keuntungan lain, koneksi ini
bisa dilakukan secara nirkabel.
pengendalian dari robot jaringan ini bisa langsung dengan internet yang
saling berhubungan antara robot dan perangkat keras yang terhubung
dengan media internet.
 |
| Robot Jaringan |
Di
Indonesia, pengembang robot jaringan belum banyak, meski pengembang dan
komunitas robot secara umum sudah banyak. Hal ini disebabkan tuntutan
teknis yang jauh lebih kompleks. Salah satu robot jaringan yang sudah
berhasil dikembangkan adalah LIPI Wireless Robot (LWR) yang dikembangkan
oleh Grup Fisika Teoritik dan Komputasi - GFTK LIPI.
Seperti ditunjukkan di LWR, seluruh proses kontrol dan monitoring bisa dilakukan melalui perambah internet. Lebih jauh, seluruh sistem dan protokol yang dikembangkan untuk LWR ini telah dibuka sebagai open-source dengan lisensi GNU Public License (GPL) di SourceForge dengan nama openNR.
Seperti ditunjukkan di LWR, seluruh proses kontrol dan monitoring bisa dilakukan melalui perambah internet. Lebih jauh, seluruh sistem dan protokol yang dikembangkan untuk LWR ini telah dibuka sebagai open-source dengan lisensi GNU Public License (GPL) di SourceForge dengan nama openNR.
- Robot Manipulator (Tangan)
 |
| Robot Manipulator (Tangan) |
- Robot Humanoid
Robot humanoid adalah robot yang penampilan keseluruhannya dibentuk berdasarkan tubuh manusia,
mampu melakukan interaksi dengan peralatan maupun lingkungan yang
dibuat-untuk-manusia. Secara umum robot humanoid memiliki tubuh dengan kepala, dua buah lengan dan dua kaki, meskipun ada pula beberapa bentuk robot humanoid yang hanya berupa sebagian dari tubuh manusia, misalnya dari pinggang ke atas. Beberapa robot humanoid juga memiliki 'wajah', lengkap dengan 'mata' dan 'mulut'. Android merupakan robot humanoid yang dibangun untuk secara estetika menyerupai manusia.
Robot humanoid digunakan sebagai alat riset pada beberapa area ilmu pengetahuan. Periset perlu mengetahui struktur dan perilaku tubuh manusia (biomekanik) agar dapat membangun dan mempelajari robot humanoid. Di sisi lain, upaya mensimulasikan tubuh manusia mengarahkan pada pemahaman yang lebih baik mengenai hal tersebut. Kognisi manusia adalah bidang studi yang berfokus kepada bagaimana manusia belajar melalui informasi sensori dalam rangka memperoleh keterampilan persepsi dan motorik. Pengetahuan ini digunakan untuk mengembangkan model komputasi dari perilaku manusia dan hal ini telah berkembang terus sepanjang waktu.
Robot humanoid digunakan sebagai alat riset pada beberapa area ilmu pengetahuan. Periset perlu mengetahui struktur dan perilaku tubuh manusia (biomekanik) agar dapat membangun dan mempelajari robot humanoid. Di sisi lain, upaya mensimulasikan tubuh manusia mengarahkan pada pemahaman yang lebih baik mengenai hal tersebut. Kognisi manusia adalah bidang studi yang berfokus kepada bagaimana manusia belajar melalui informasi sensori dalam rangka memperoleh keterampilan persepsi dan motorik. Pengetahuan ini digunakan untuk mengembangkan model komputasi dari perilaku manusia dan hal ini telah berkembang terus sepanjang waktu.
 |
| Robot Humanoid |
Sensor
merupakan alat yang dapat mengukur beberapa atribut dan merupakan salah
satu dari tiga primitif dari robotika (disamping perencanaan dan
pengendalian). Penginderaan memainkan peranan penting dalam paradigma
robotika.
Sensor dapat digolongkan berdasarkan proses fisik dengan apa yang mereka kerjakan atau berdasarkan kepada jenis informasi pengukuran yang mereka berikan sebagai keluaran. Dalam kasus ini, pendekatan kedua yang dipergunakan.
Aktuator merupakan motor yang bertanggungjawab untuk gerakan pada robot. Robot humanoid dibangun sedemikian rupa agar mereka mirip dengan tubuh manusia, maka mereka juga mempergunakan aktuator yang berlaku seperti otot dan sendi, meskipun dengan struktur yang berbeda. Agar dapat mencapai efek yang sama dengan gerakan manusia, robot humanoid terutama menggunakan aktuator rotari. Mereka dapat berupa elektrik, pneumatik, hidraulik, piezoelektrik, atau ultrasonik.
Sensor dapat digolongkan berdasarkan proses fisik dengan apa yang mereka kerjakan atau berdasarkan kepada jenis informasi pengukuran yang mereka berikan sebagai keluaran. Dalam kasus ini, pendekatan kedua yang dipergunakan.
Aktuator merupakan motor yang bertanggungjawab untuk gerakan pada robot. Robot humanoid dibangun sedemikian rupa agar mereka mirip dengan tubuh manusia, maka mereka juga mempergunakan aktuator yang berlaku seperti otot dan sendi, meskipun dengan struktur yang berbeda. Agar dapat mencapai efek yang sama dengan gerakan manusia, robot humanoid terutama menggunakan aktuator rotari. Mereka dapat berupa elektrik, pneumatik, hidraulik, piezoelektrik, atau ultrasonik.
- Robot Berkaki
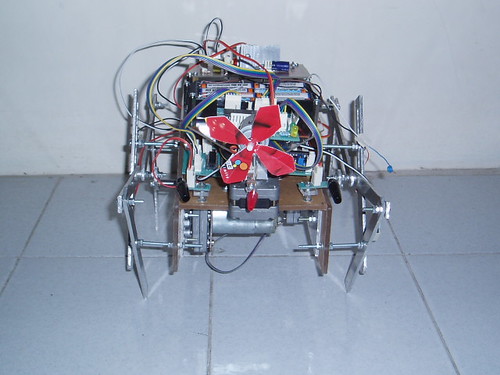 |
| Robot Berkaki |
Robot yang
mampu terbang, robot inin menyerupai pesawat model yang diprogram khusus
untuk memonitor keadaan di tanah dari atas, dam jug untuk meneruskan
komunikasi.
- Underwater Robot (Robot dalam Air)
Robot ini digunakan di bawah laut untuk memonitor kondisi bawah laut dan juga untuk mengambil sesuatu di bawah laut.
 |
| Underwater Robot ( Robot dalam Air) |
Tidak ada komentar:
Posting Komentar